Today I stumbled across an interesting problem. The concern is that we should rotate a one-dimensional vector of element left by () positions.
Problem statement
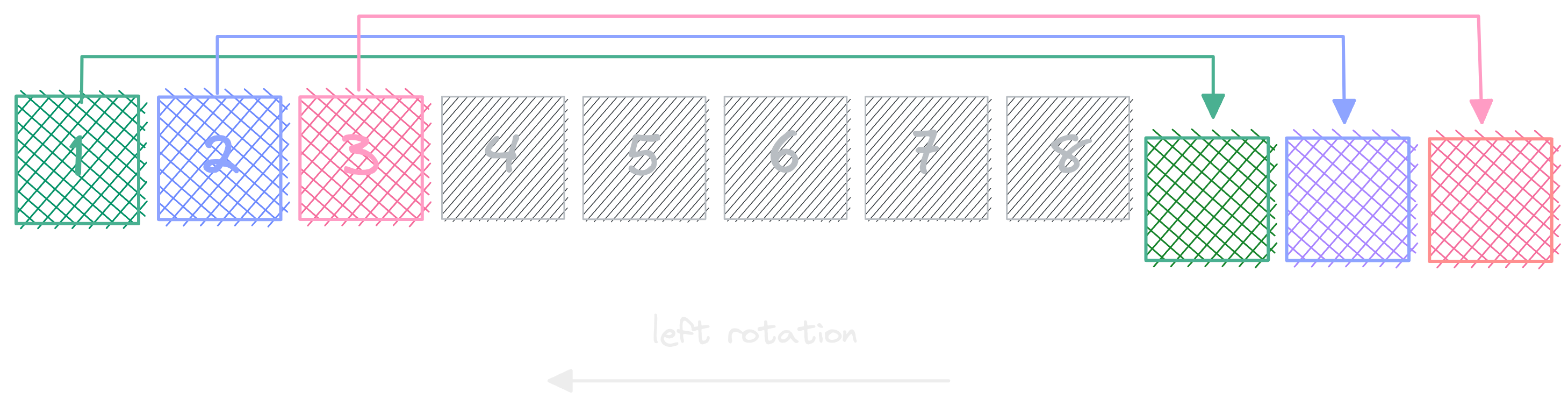
For instance, say we have an array with elements should rotate it by shifts. For example, vector [1,2,3,4,5,6,7,8] is rotated to [4,5,6,7,8,1,2,3].
A naive algorithm will use an n-element intermediate vector to do the job in steps or copy the underlying array with language dependant slicing features (where space is ) or compute in-place shift by holding a temporary variable with iterations (which will take a running time of ).
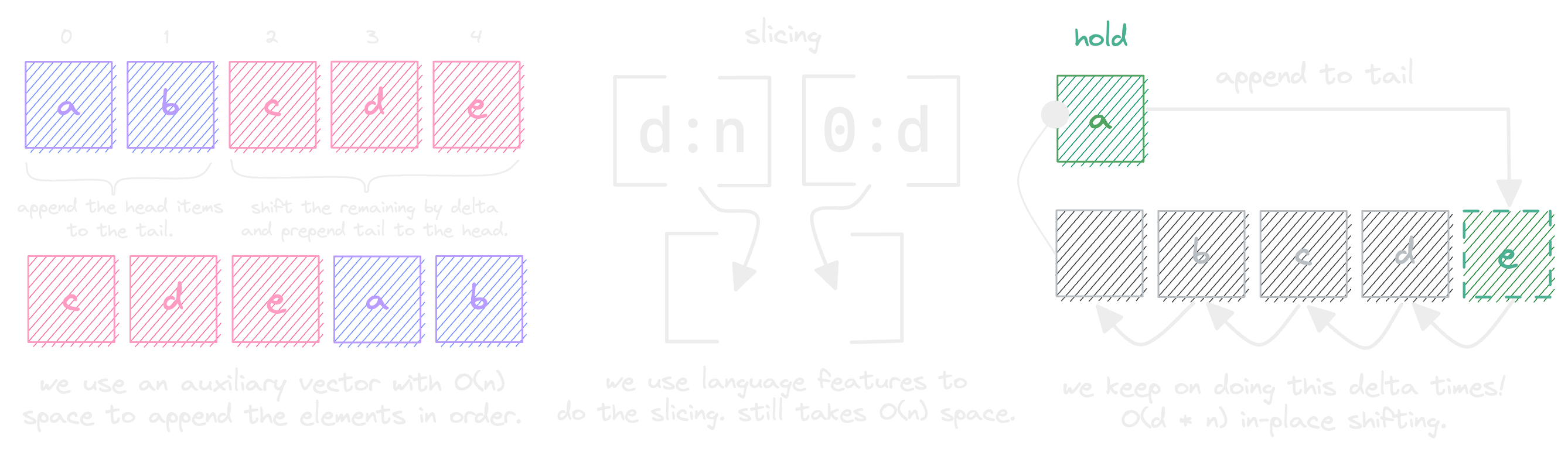
Programming languages like python have insanely fast and well-optimized slicing operations. So, instead of iterating, a naive slicing algorithm could be faster for smaller input sizes (Eli Bendersky, 2008).
But we are better than this! can we rotate the vector in time proportional to without additional memory allocations ?
Aha!
Yes, we can! Thanks to Jon Bentley, in his Programming Pearls (2nd edition) book, he mentioned three vector rotation algorithms called juggling, swapping, and reversing.
Jon derived a smart insight in which he calls the aha! moment! because, in the reverse rotation technique, it is basically two arrays reversed twice. Truly marvelous!
The reversing algorithm is pretty straightforward, and the other two are very clever. But for this code fragment, I wil only go through the reversing algorithm because that’s the most elegant code. Jon makes use of a bidirectional iterator to perform the task in time.
Bidirectional Iterator is an iterator that can be both incremented and decremented. The requirement that a bidirectional iterator can be decremented is the only thing that distinguishes bidirectional iterators from forward iterators1. In this case, we are using two iterators called and .
Now let’s dive into the algorithm! woohoo! 🥳🕺
Reverse rotate
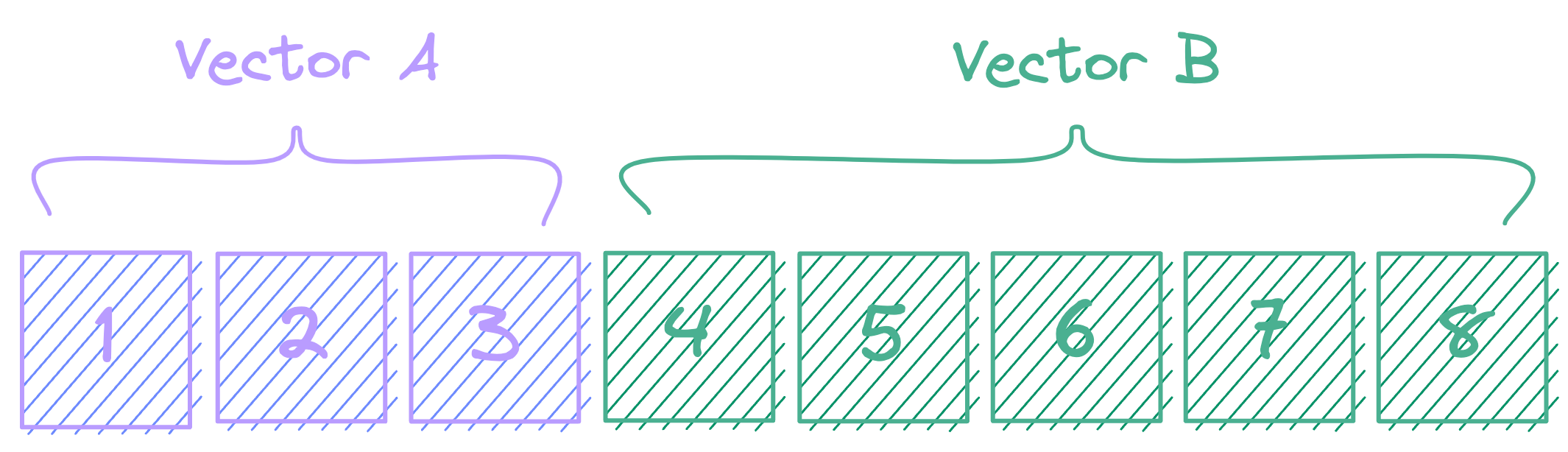
Recall the example in the problem description. we have to left rotate the vector [1,2,3,4,5,6,7,8] by . If we view it as two sub-vectors, we get and items long sub-vector: [1,2,3]-[4,5,6,7,8].
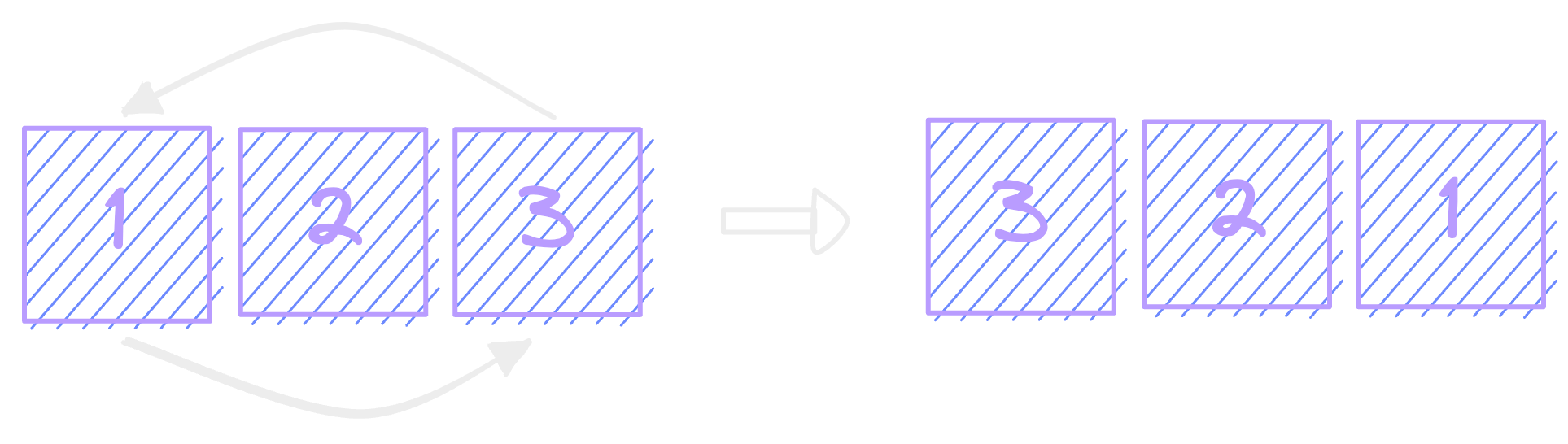
In jon’s algorithm, to rotate the vector, we reverse the first sub-vector to obtain [3,2,1,4,5,6,7,8]. Essentially, the first reverse of the sub-vector a is swapping the positions of each element until delta.
Then, reverse the second sub-vector b to obtain [3,2,1,8,7,6,5,4]. like previously, we make use of the two-pointers to swap them in-place without additional space overhead.
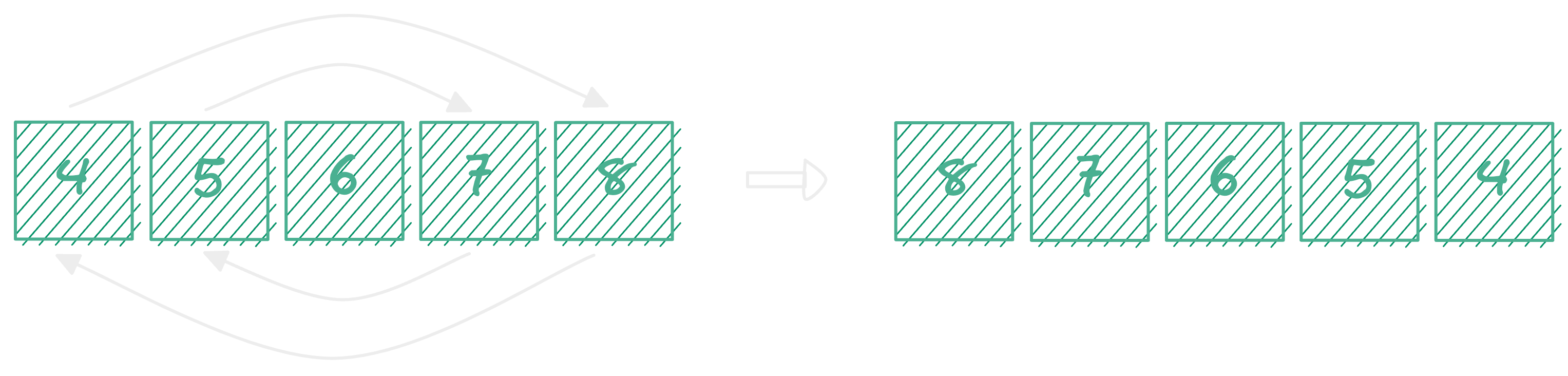
Finally, reverse the whole thing to obtain [4,5,6,7,8,1,2,3].

That’s it! how cool is that, huh?
Implementation
Here’s a golang implementation of this algorithm. The reverse function takes a pointer to the array and bidirectional iterator positions and for swapping the indexes. Then, we loop until to swap and , and consecutively we increment and decrement by one.
Then comes the real magic. Inside the reverseRotate function we invoke the reverse routine times. The first call is to get (we start from for , and is always ), and then the second call is to derive (we start from for and swap until ). At this point, we only need to reverse the entire array once from to to obtain the rotated vector.
func reverse(x *[]int, i, j int) {
for i < j {
(*x)[i], (*x)[j] = (*x)[j], (*x)[i]
i++
j--
}
}
func reverseRotate(x *[]int, delta int) {
reverse(x, 0, delta-1)
reverse(x, delta, len(*x)-1)
reverse(x, 0, len(*x)-1)
}This is an elegant way to solve the problem, especially considering one vector as a sum of two (Prakhar Srivastav, 2014). In Aha! Algorithms Research Paper Jon mentions that this reversal code is guaranteed time and space-efficient and is so short and so damn simple that it’s pretty hard to get wrong.
It is precisely the code that Brian Kernighan & Bill Plauger use in their Software Tools book’s editor and also what Ken Thompson used in his text editor ed to manipulate lines.
Stay curious
These are some interesting resources I referred while writing this post. Be sure to check these posts from great engineers out there!
- Book - Programming Pearls 2nd edition
- Paper - Aha! Algorithms
- Prakhar Srivastav @ Google
- Eli Bendersky @ Google
Thanks a million for reading! until next time!